Diagrama de temas
-
-
Foro
-
-
-
BLINK, PARPADEO DE UN LED
CIRCUITO
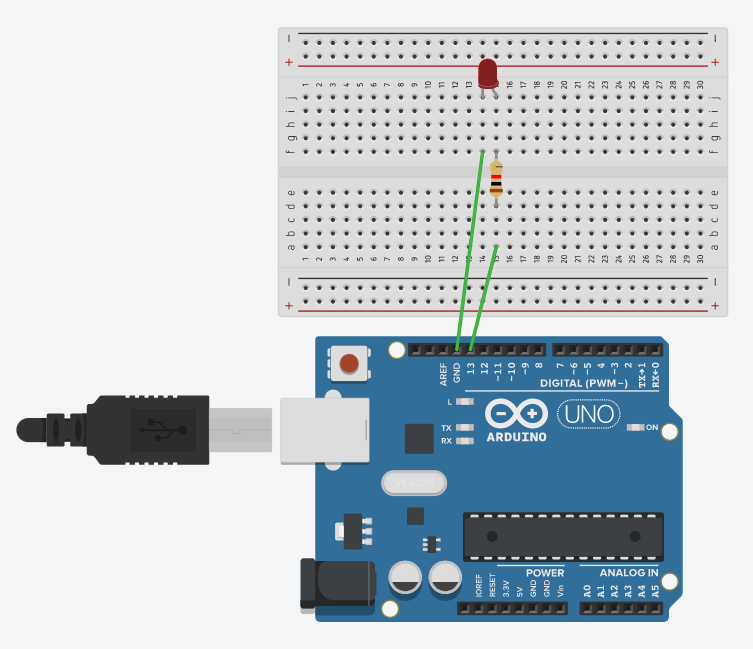
MATERIALES
1 LED
1 RESISTENCIA 1 KΩ
1 ARDUINO UNO R3
JUMPERS
CÓDIGO
void setup()
{
pinMode(13, OUTPUT);
}void loop()
{
digitalWrite(13, HIGH);
delay(1000);
digitalWrite(13, LOW);
delay(1000);
}BLINK, PARPADEO DE DOS LED
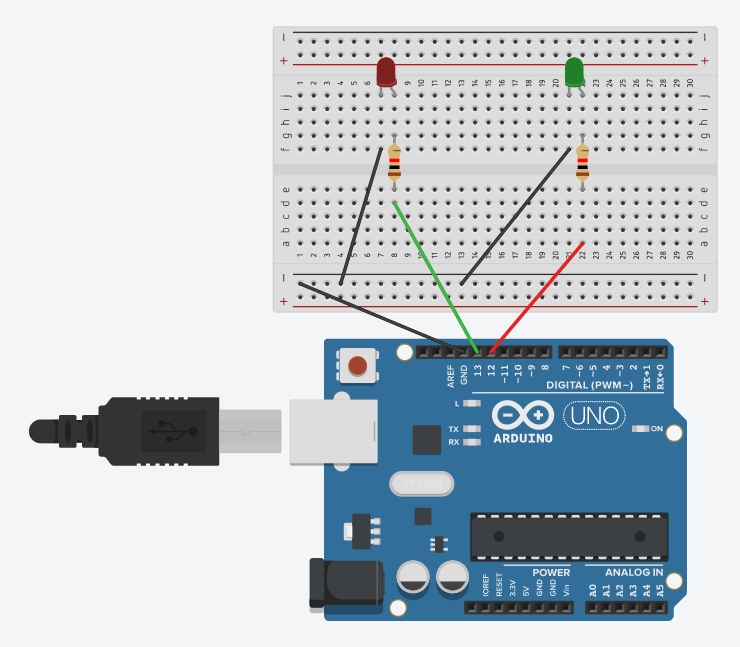
MATERIALES
2 LED
2 RESISTENCIA 1 KΩ
1 ARDUINO UNO R3
JUMPERS
CÓDIGO
void setup()
{
pinMode(13, OUTPUT);pinMode(12, OUTPUT);
}void loop()
{
digitalWrite(13, HIGH);digitalWrite(12, LOW);
delay(1000);
digitalWrite(13, LOW);digitalWrite(12, HIGH);
delay(1000);
}BLINK, PARPADEO DE TRES LED, SEMAFORO
CIRCUITO
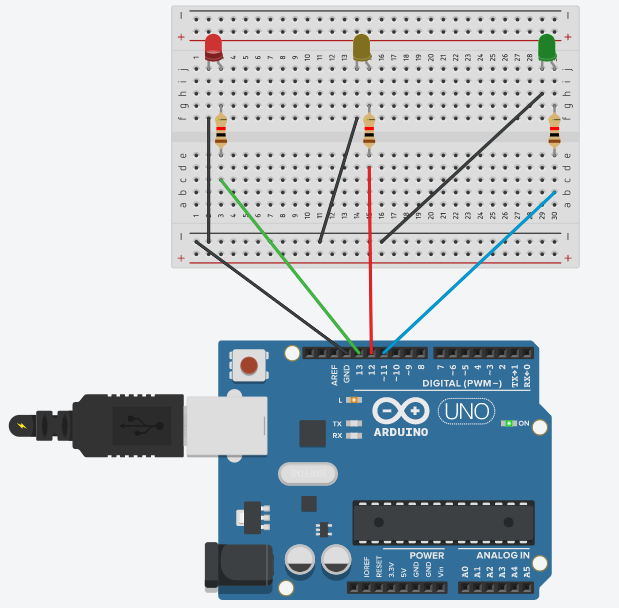
MATERIALES
3 LED
3 RESISTENCIAS 1 KΩ
1 ARDUINO UNO R3
JUMPERS
CÓDIGO
void setup()
{
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
}void loop()
{
digitalWrite(13, HIGH);
digitalWrite(12, LOW);
digitalWrite(11, LOW);
delay(3000);
digitalWrite(13, LOW);
digitalWrite(12, HIGH);
digitalWrite(11, LOW);
delay(3000);
digitalWrite(13, LOW);
digitalWrite(12, LOW);
digitalWrite(11, HIGH);
delay(3000);
}
-
-
-
CIRCUITO
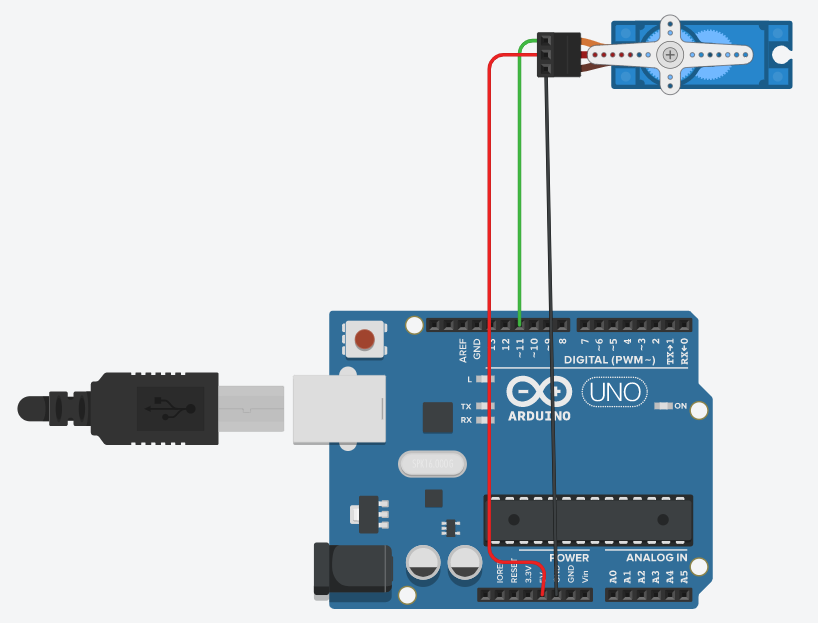
MATERIALES
1 MICRO SERVO MOTOR
1 ARDUINO UNO R3
JUMPERS
CÓDIGO
#include <Servo.h>
Servo servo;void setup(){
servo.attach(11);
}void loop(){
servo.write(0);
delay(1000);
servo.write(120);
delay(1000);
}
-
-
-
LED CONTROLADO POR BOTÓN
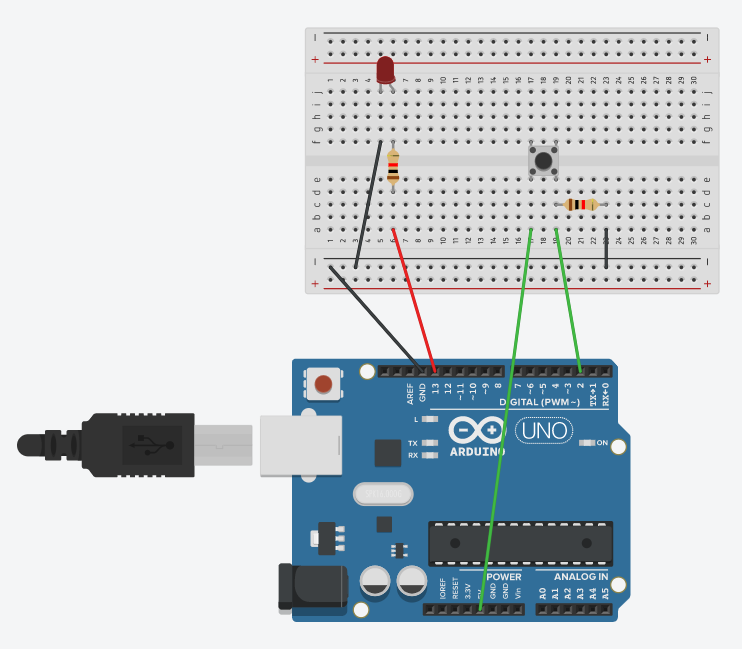
MATERIALES
1 LED
2 RESISTENCIAS 1KΩ
1 PUSHBUTTON
1 ARDUINO UNO R3
1 PLACA DE PRUEBA
JUMPERS
CÓDIGO
int boton;
void setup()
{
pinMode(13, OUTPUT);
pinMode(2, INPUT);
}void loop()
{
boton=digitalRead(2);
if(boton==HIGH){digitalWrite(13, HIGH);}
else{digitalWrite(13, LOW);}
}SERVO MOTOR CONTROLADO POR BOTÓN
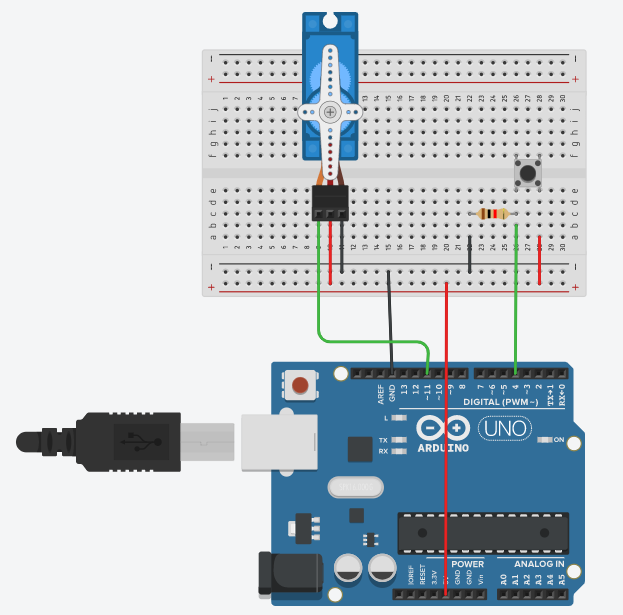
MATERIALES
1 MICRO SERVO MOTOR
1 PUSHBUTTON
1 RESISTENCIA 1 KΩ
1 ARDUINO UNO R3
1 PLACA DE PRUEBA
JUMPERS
CÓDIGO
#include <Servo.h>
Servo servo;
int angulo=0;
void setup()
{
servo.attach(11);
pinMode(4, INPUT);
}void loop(){
int boton=digitalRead(4);
if(boton==HIGH){
servo.write(angulo);
angulo=angulo+1;
delay(5);}
else{angulo=0;
servo.write(angulo);}
}
-
-
-
-
CIRCUITO
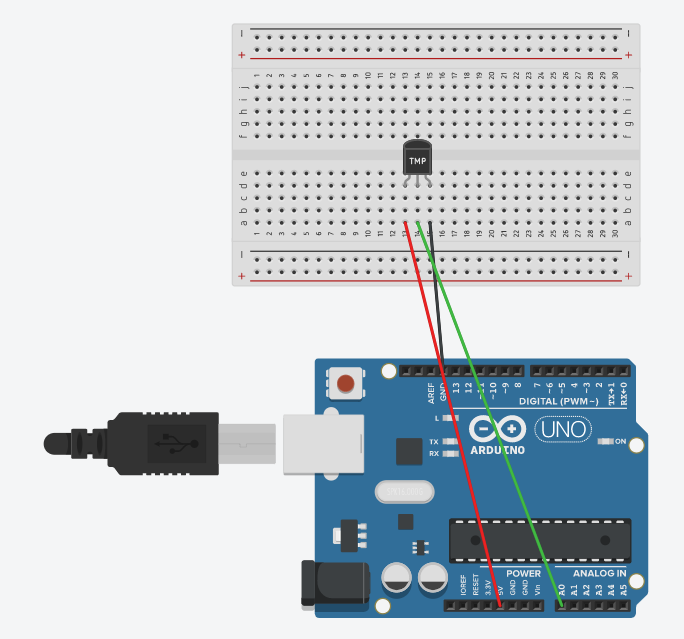
MATERIALES
- Temperature Sensor [TMP36]
- Arduino Uno R3
CÓDIGO ESCALA CELSIUS:
void setup()
{
Serial.begin(9000);
pinMode(A0,INPUT );
}void loop()
{
int temp=analogRead(A0);
temp = (5.0 * temp *100)/1024.0 -50;
Serial.println(temp);
}CÓDIGO ESCALA CELSIUS Y FAHRENHEIT:
void setup()
{
Serial.begin(9000);
pinMode(A0,INPUT );
}void loop()
{
float temp=analogRead(A0);
temp = (5.0 * temp *100)/1024.0 -50;float temp1=1.8*temp+32;
Serial.println(temp);
}CÓDIGO ESCALA CELSIUS Y KELVIN:
void setup()
{
Serial.begin(9000);
pinMode(A0,INPUT );
}void loop()
{
float temp=analogRead(A0);
temp = (5.0 * temp *100)/1024.0 -50;float temp1=1.0*temp+273;
Serial.println(temp);
}
-
-
-
CIRCUITO
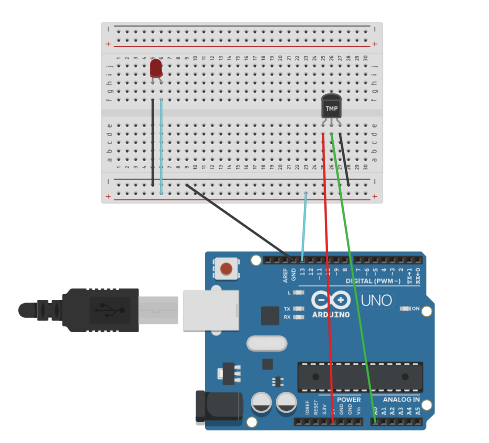
MATERIALES
1 Arduino Uno R3
1 Sensor de Temperatura TMP 36
1 Led
CÓDIGO
void setup()
{
Serial.begin(9000);
pinMode(A0,INPUT );
pinMode(13,OUTPUT);
}void loop()
{
float temp=analogRead(A0);
temp = (5.0 * temp *100)/1024.0 -50;
if(temp>=38){digitalWrite(13,HIGH);}
else{digitalWrite(13,LOW);}
Serial.println(temp);
delay(3000);
}
-
-
-
CIRCUITO
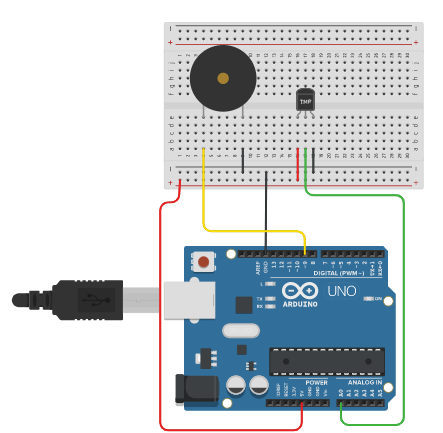
MATERIALES
- 1 Arduino Uno R3
- 1 Temperature Sensor [TMP36]
- 1 Sensor Piezo (buzzer)
CÓDIGO
void setup()
{
Serial.begin(9000);
pinMode(A0,INPUT );}
void loop()
{
float temp=analogRead(A0);
temp = (5.0 * temp *100)/1024.0 -50;
if(temp>=38){tone(9,4000);}
else{noTone(9);}Serial.println(temp);
delay(1000);
}
-
-
-
CIRCUITO
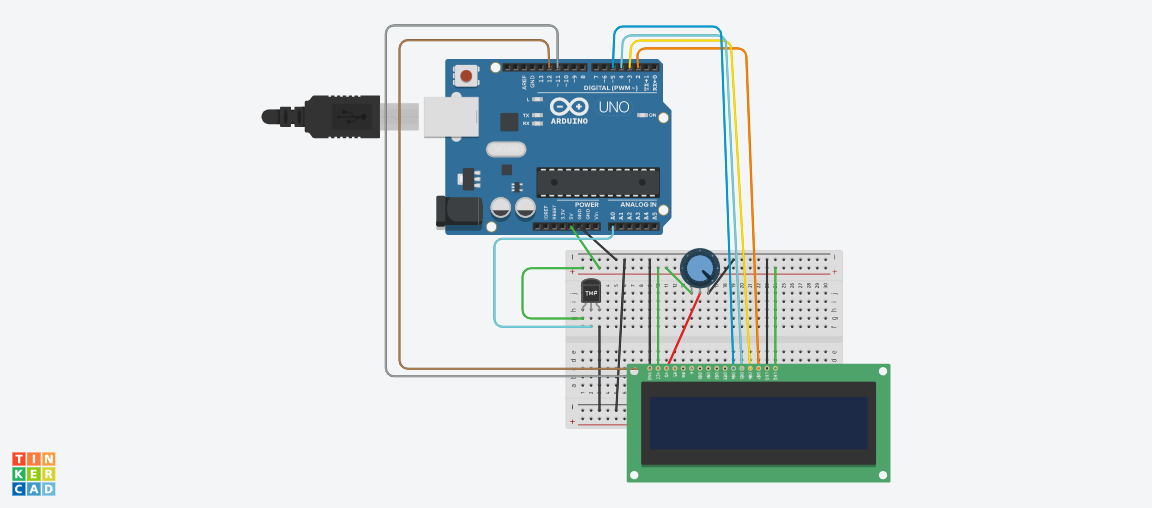
MATERIALES
1 Sensor de Temperatura TMP 36
1 LCD 16 x 2
1 Arduino Uno R3
1 Potentiometer, 1 kΩ
CÓDIGO
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);void setup()
{
lcd.begin(16,2);
lcd.home();
lcd.print("Temperatura");}
void loop()
{
float temp=analogRead(A0);
temp=temp*500.00/1024-50;
float temp1=1.8*temp+32;
delay(1000);
lcd.setCursor (0,1);
lcd.print("C=");
lcd.print(temp);
lcd.print(" F=");
lcd.print(temp1);}
-
-
CIRCUITO
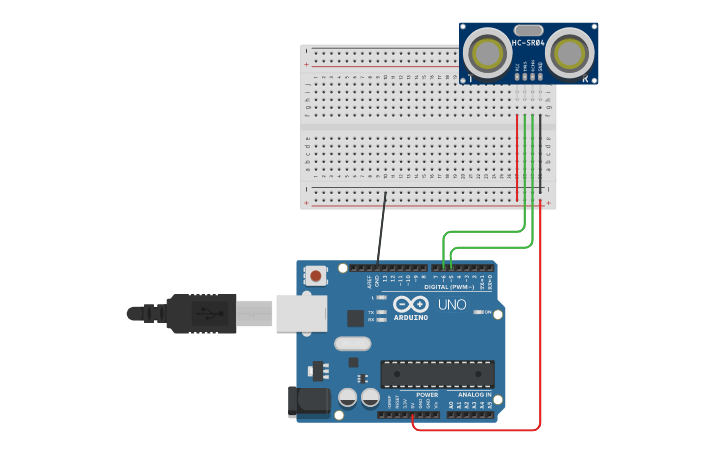
MATERIALES
1 Arduino R3
1 Ultrasonic Distance Sensor
CÓDIGO
void setup()
{
Serial.begin(9600);
pinMode(6,OUTPUT);
pinMode(5,INPUT);}
void loop()
{
int distancia, tiempo;
digitalWrite(6,HIGH);
delayMicroseconds(500);
digitalWrite(6,LOW);
tiempo=pulseIn(5, HIGH);
distancia= int(tiempo/58);
Serial.println(distancia);}
-
CIRCUITO
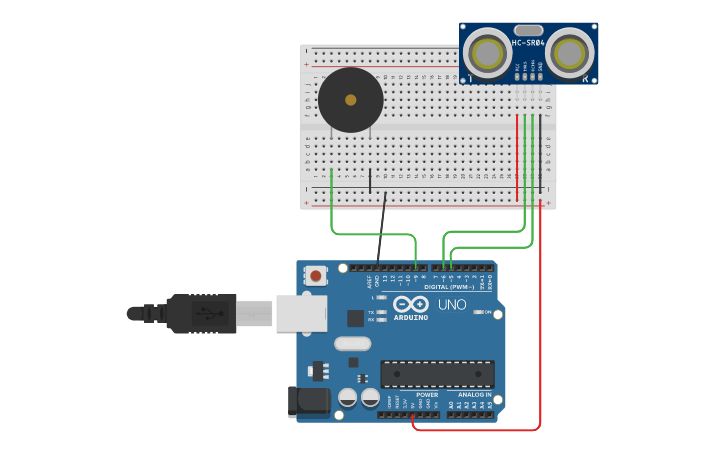
MATERIALES
- 1 Arduino Uno R3
- 1 Ultrasonic Distance Sensor
- 1 Buzzer
CÓDIGO
void setup()
{
Serial.begin(9600);
pinMode(6,OUTPUT);
pinMode(5,INPUT);
pinMode(9, OUTPUT);}
void loop()
{
int distancia, tiempo;
digitalWrite(6,HIGH);
delayMicroseconds(500);
digitalWrite(6,LOW);
tiempo=pulseIn(5, HIGH);
distancia= int(tiempo/58);
Serial.println(distancia);
if(distancia < 100){
tone(9, 400);
delay(2000);
noTone(9);
}digitalWrite(9, LOW);
}
-
-
CIRCUITO
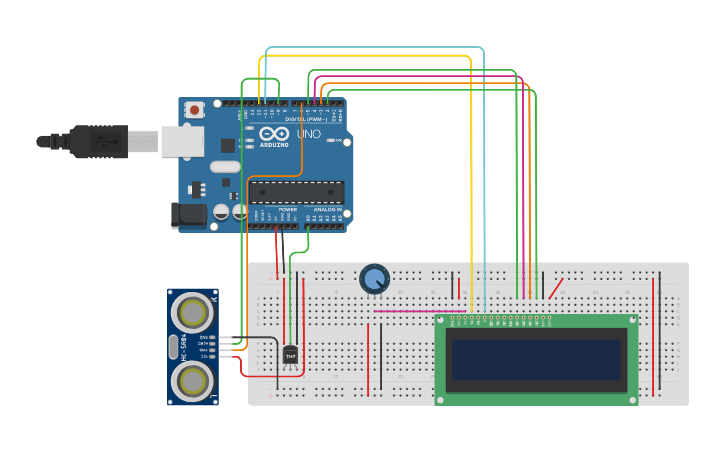
MATERIALES
- 1 Placa Arduino Uno R3
- 1 Pantalla LCD 16x2
- 1 Potentiometer, 1 kΩ
- 1 Ultrasonic Distance Sensor
- 1 Proto board
CÓDIGO
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);void setup()
{
lcd.begin(16,2);
lcd.home();
lcd.print("DISTANCIA");pinMode(6,OUTPUT);
pinMode(9,INPUT);
}void loop()
{
float distancia, tiempo;
digitalWrite(6,HIGH);
delayMicroseconds(500);
digitalWrite(6,LOW);
tiempo=pulseIn(9, HIGH);
distancia= int(tiempo/58);
Serial.println(distancia);
delay(1000);
lcd.setCursor (0,1);
lcd.print(distancia);
lcd.print(" Centimetro");
} -
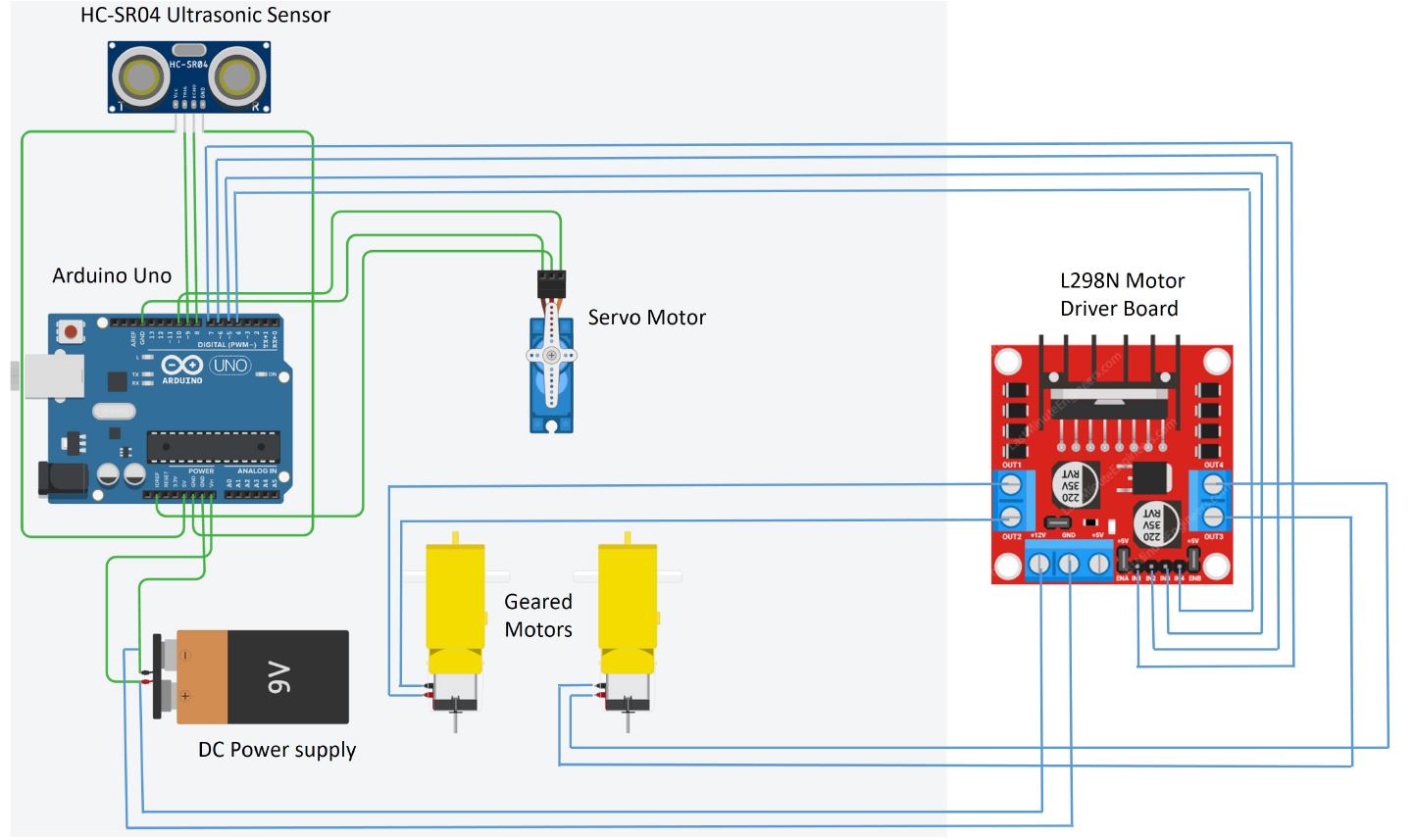
CARRO EVASOR DE OBSTÁCULOS
-
MATERIALES
1. Arduino UNO board
2. L298N motor driver
3. HC-SR04 Ultrasonic Sensor
4. SG 90 Servo Motor :
6. 18650 battery holder with on/off switch
CIRCUITO
CÓDIGO
#include <Servo.h>
Servo Myservo;
#define trigPin 9 // Trig Pin Of HC-SR04
#define echoPin 8 // Echo Pin Of HC-SR04
#define MLa 4 //left motor 1st pin
#define MLb 5 //left motor 2nd pin
#define MRa 6 //right motor 1st pin
#define MRb 7 //right motor 2nd pin
long duration, distance;void setup() {
Serial.begin(9600);
pinMode(MLa, OUTPUT); // Set Motor Pins As O/P
pinMode(MLb, OUTPUT);
pinMode(MRa, OUTPUT);
pinMode(MRb, OUTPUT);
pinMode(trigPin, OUTPUT); // Set Trig Pin As O/P To Transmit Waves
pinMode(echoPin, INPUT); //Set Echo Pin As I/P To Receive Reflected Waves
Myservo.attach(10);
}
void loop()
{
Serial.begin(9600);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Transmit Waves For 10us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // Receive Reflected Waves
distance = duration / 58.2; // Get Distance
Serial.println(distance);
delay(10);
if (distance > 25) // Condition For Absence Of Obstacle
{
Myservo.write(90);
digitalWrite(MRb, HIGH); // Move Forward
digitalWrite(MRa, LOW);
digitalWrite(MLb, HIGH);
digitalWrite(MLa, LOW);
}
else if ((distance < 10)&&(distance > 0)) // Condition For Presence Of Obstacle
{
digitalWrite(MRb, LOW); //Stop
digitalWrite(MRa, LOW);
digitalWrite(MLb, LOW);
digitalWrite(MLa, LOW);
delay(100);
Myservo.write(0);
delay(500);
Serial.begin(9600);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Transmit Waves For 10us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // Receive Reflected Waves
distance = duration / 58.2; // Get Distance
Serial.println(distance);
delay(10);
if (distance > 25)
{
Myservo.write(90);
delay(500);
digitalWrite(MRb, LOW); // Move Backward
digitalWrite(MRa, HIGH);
digitalWrite(MLb, LOW);
digitalWrite(MLa, HIGH);
delay(100);
digitalWrite(MRb, LOW); //Stop
digitalWrite(MRa, LOW);
digitalWrite(MLb, LOW);
digitalWrite(MLa, LOW);
delay(100);
digitalWrite(MRb, LOW); // Move Left
digitalWrite(MRa, LOW);
digitalWrite(MLa, HIGH);
digitalWrite(MLb, LOW);
delay(1500);
}
else if ((distance < 20)&&(distance > 0))
{
Myservo.write(180);
delay(500);
Serial.begin(9600);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Transmit Waves For 10us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // Receive Reflected Waves
distance = duration / 58.2; // Get Distance
Serial.println(distance);
delay(10);
if (distance > 25)
Myservo.write(90);
delay(500);
digitalWrite(MRb, LOW); // Move Backward
digitalWrite(MRa, HIGH);
digitalWrite(MLb, LOW);
digitalWrite(MLa, HIGH);
delay(100);
digitalWrite(MRb, LOW); //Stop
digitalWrite(MRa, LOW);
digitalWrite(MLb, LOW);
digitalWrite(MLa, LOW);
delay(100);
digitalWrite(MRb, LOW); // Move Right
digitalWrite(MRa, HIGH);
digitalWrite(MLa, LOW);
digitalWrite(MLb, LOW);
delay(1500);
}
}
}
-
-
CARRO EVASOR DE OBSTÁCULOS